
Consider these methods to help protect systems from high-frequency current damage.
ABB
06/20/2019
 Image 1. An external source of shaft voltage exists for induction motors operated by adjustable speed drives. (Images courtesy of ABB)
Image 1. An external source of shaft voltage exists for induction motors operated by adjustable speed drives. (Images courtesy of ABB) Image 2. Sources of induced voltage on the shaft may vary.
Image 2. Sources of induced voltage on the shaft may vary.Common Mode Voltage & Bearing Current
For induction motors operated by adjustable speed drives (ASDs), such as inverters or variable frequency drives (VFDs), a second, external source of shaft voltage exists. This external source is a result of the voltage wave shape provided by the inverter. Unlike balanced, three-phase sine wave operation, VFDs create switching patterns where the instantaneous average voltage to ground is not zero. This instantaneous voltage is referred to as common mode voltage (CMV). The voltage changes rapidly in magnitude with respect to time (high dV/dt), so its frequency content can be in the MHz range. As the current through a capacitor is defined by the equation I=C*dV/dt, this rapidly changing voltage can result in capacitively coupled currents from the motor windings to ground through several paths. Image 3. Proper grounding is a major factor in preventing bearing damage due to circulating currents.
Image 3. Proper grounding is a major factor in preventing bearing damage due to circulating currents.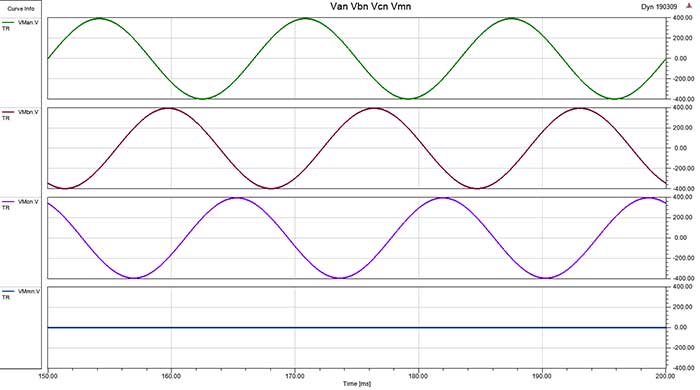
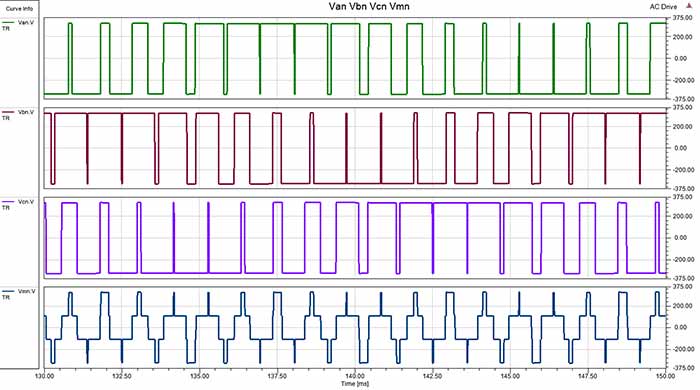 Image 4a (top). Common mode voltage for three-phase sinewave voltages. Image 4b (bottom). Common mode voltage for three-phase PWM voltages.
Image 4a (top). Common mode voltage for three-phase sinewave voltages. Image 4b (bottom). Common mode voltage for three-phase PWM voltages.Bearing Current Remediation
There are many possible ways to reduce the magnitude and paths of current flow shown in Image 4. For inverter-fed motors, reducing or eliminating the CMV addresses the problem at its source. However, the CMV is a function of the drive design and cannot be addressed on existing applications. Image 5. Pumping application
Image 5. Pumping application- improving the high-frequency ground connection from the motor to the drive and from the motor to the driven equipment
- insulating the bearing on the opposite drive end (ODE) of the motor
- using two insulated motor bearings
- using a shaft grounding brush across the drive end (DE) motor bearing, which could be mounted inside the motor housing or outside
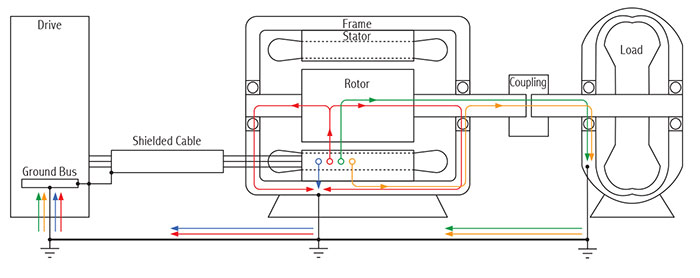
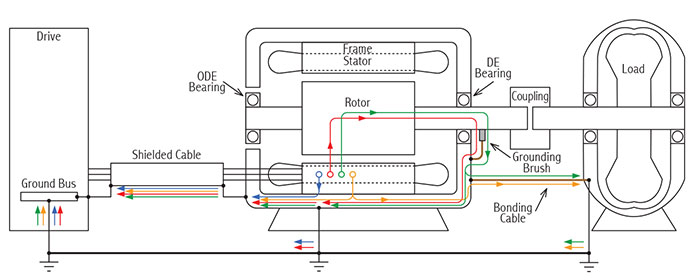 Image 6a (top). Paths of common mode currents from stator to ground, back to drive. Image 6b (bottom). Paths of common mode currents from stator to ground, back to drive through the cable shield.
Image 6a (top). Paths of common mode currents from stator to ground, back to drive. Image 6b (bottom). Paths of common mode currents from stator to ground, back to drive through the cable shield.Conclusion
Bearing currents have existed since the induction motor was invented. CMV induced currents are a phenomenon resulting from high switching frequency drives. Proper grounding is a major factor in preventing bearing damage due to circulating currents. Protecting an installation from bearing current damage requires a thorough understanding of the inverter/motor/load system. Identification of potential high-frequency current paths is crucial to providing an effective solution. References- C. Pearce, “Bearings Currents - Their Origin and Prevention,” The Electric Journal, August 1927.
- R. F. Schiferl &. M. J. Melfi, “Bearing Current Remediation Options,” IEEE Industry Applications Magazine, August 2004.
