
Q:At what range outside the best efficiency point (BEP) will a pump begin to experience vibration? What consequences will occur from operating a pump away from BEP? A: As flow is reduced below the BEP flow rate, the flow pattern through the pump changes and leads to a phenomenon known as suction recirculation. Suction recirculation occurs when the flow in the inlet area of the impeller separates from the vanes, forming recirculating eddies. These areas of non-uniform flow and uneven pressure distribution result in increased vibration of the pump rotor, cavitation damage to the impeller and excessive noise. These effects increase as the rate of flow decreases, so the larger the deviation from the BEP, the more severe these effects. In addition, pumps with a higher suction specific speed design experience earlier and more intense suction recirculation than pumps with a lower suction specific speed design. Figure 9.6.3.3.1.0a depicts the relationship between suction specific speed, rate of flow (percent of BEP), and the onset of suction recirculation and can be used as a guide to understand when vibration from this phenomena will begin to occur.
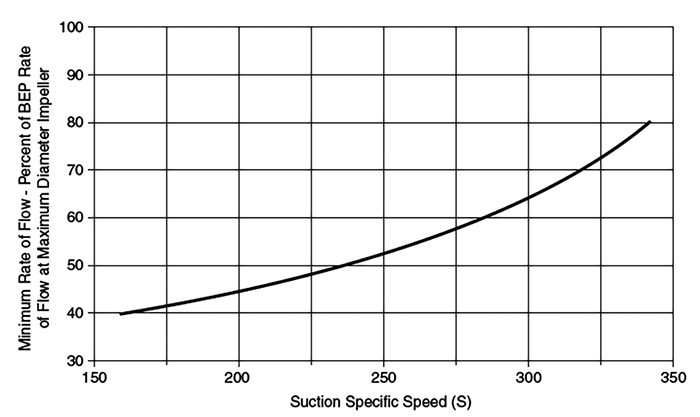 Figure 9.6.3.3.10a. Estimated minimum rate of flow to avoid suction recirculation (metric units). (Graphics courtesy of Hydraulic Institute)
Figure 9.6.3.3.10a. Estimated minimum rate of flow to avoid suction recirculation (metric units). (Graphics courtesy of Hydraulic Institute)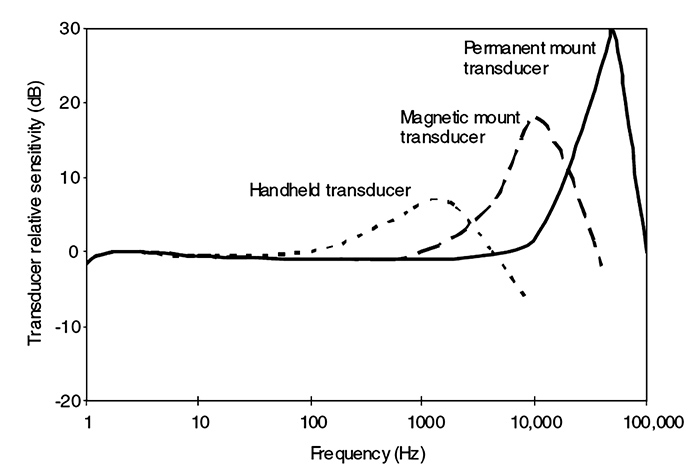 Figure E.1 Transducer mounting relative sensitivity
Figure E.1 Transducer mounting relative sensitivity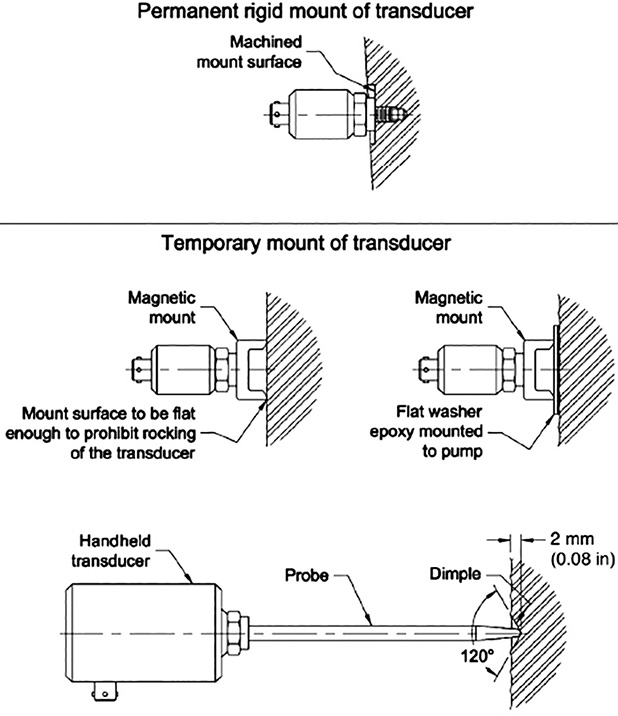 Figure 9.6.4.2.2.2. Transducer mounting
Figure 9.6.4.2.2.2. Transducer mounting