
Magnetic force is a consequence of electromagnetic force, one of four fundamental forces of nature, and is caused by relative motion of electric charges. This phenomenon is at the heart of any electric motor, whether alternating current (AC), direct current (DC) or those with or without permanent magnets. Most pumps are driven by AC induction motors. AC induction motors have a stationary outer member consisting of a core of laminated magnetic steel, with equally spaced slots distributed around the periphery. These slots hold the motor’s only electrical winding. This assembly is the stator. The rotating portion of the motor is called the rotor and consists of a similar stack of slotted laminations. These slots form and hold the rotor conductors, referred to as the rotor winding, or cage. Generally, these conductors are diecast bars cast directly into the slots or made of extruded aluminum or copper material and driven axially into the slots. There is no electrical connection to the rotor winding.
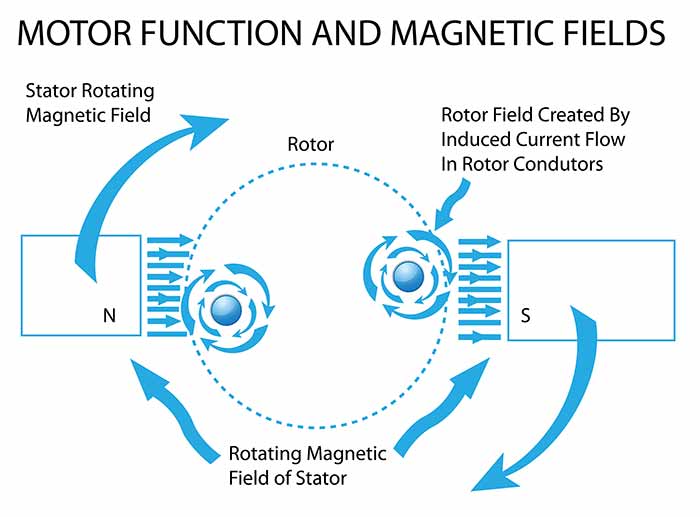 Image 1. Motor function and magnetic fields (Images courtesy of DSI/Dynamatic)
Image 1. Motor function and magnetic fields (Images courtesy of DSI/Dynamatic)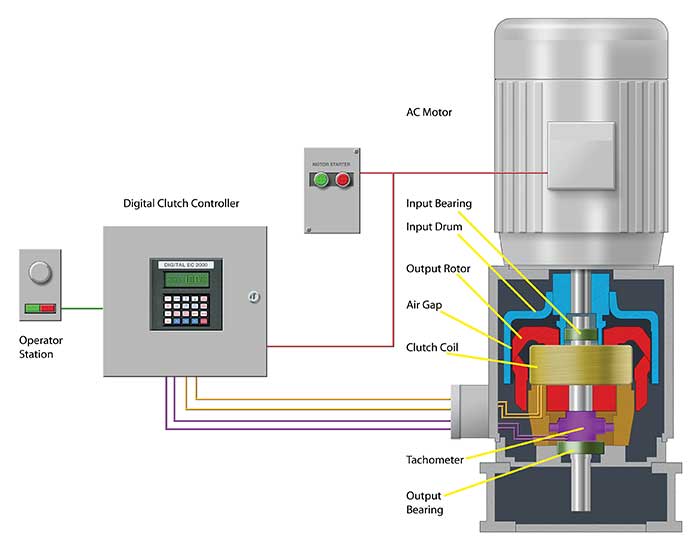 Image 2. Inside an eddy current drive
Image 2. Inside an eddy current drive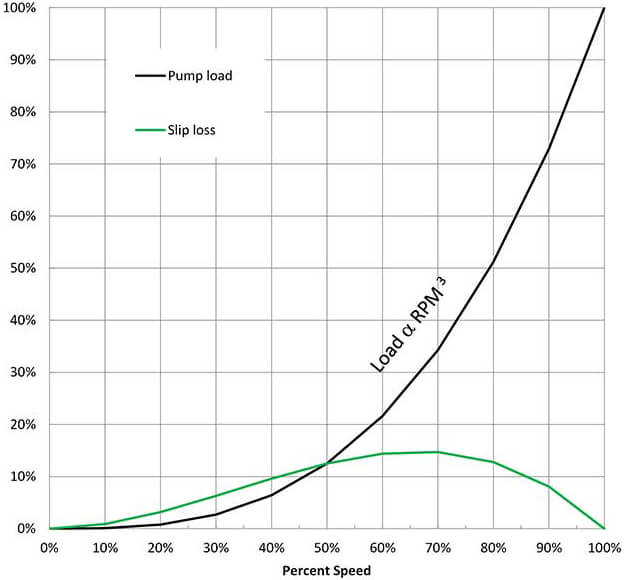 Image 3. Load reduction exceeds slip loss for every increment of speed reduction
Image 3. Load reduction exceeds slip loss for every increment of speed reduction