
It has been said that Washington, D.C., is the home of the largest invertebrate population in the U.S. This, of course, jokingly refers to the population of politicians and their lack of backbone or guts required to make difficult decisions. The same analogy could be applied to the single-phase motor, as it has only one-third the “guts” of its three-phase cousin. However, it can still perform well as long as expectations are reasonable.
Single-Phase Magnetic Field
Figure 1 (below) illustrates one cycle (Hertz) of a single-phase, AC sine wave. Unlike the three-phase curve discussed in Part Two of the series (Pumps & Systems, April 2011), this one peaks only twice per cycle, and the peaks occur 180 degrees apart. It was those peaks that occurred just 60 degrees apart that provided a true rotating magnetic field in the three-phase stator. Can the single-phase wave form produce a rotating field in a single-phase stator, and if so, what does it look like?
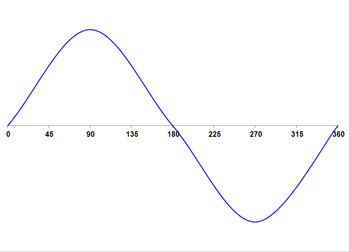
Figure 1: One cycle of a single-phase AC sine wave
Figure 2 (below) shows a single-phase, two-pole stator with the poles oriented in a north/south position. It looks similar to the three-phase version except that it is missing four poles. It is not as easy to visualize the field that is created between the two poles without animation, but let's give it a try.
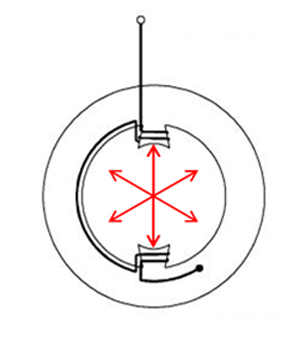
Figure 2: A single-phase, two-pole stator with the poles oriented in a north/south position
At 90 degrees, the wave reaches its positive peak, and the field strength in the upper pole is at its maximum. At 270 degrees, the wave reaches its negative peak, and the magnetic field is transferred to the bottom pole. During this downward migration, the magnetic field travels toward the lower pole on both sides of the stator.
When the wave begins to rise again, the magnetic field begins to reverse direction and travels toward the upper pole, and again, it occurs on both sides of the stator. The result is a pulsating field that occurs twice each cycle. It is not a rotational field, and if single-phase power were applied to this stator, the rotor would not turn. If, however, you give it a twist with your hand (in either direction), it will begin to rotate and will remain in rotation as long as power is applied.
Twisting the shaft causes induction to occur, and the interaction between the induced fields and the stator fields plus the inertia of the rotor maintains the rotational motion. Unlike the three-phase motor, all single-phase motors require an auxiliary starting component to begin rotation.
Single-Phase Starting
Although a number of single-phase starting techniques are available, most use a second set of poles to create a “synthetic” second phase (split phase) that works in conjunction with the primary phase to produce a rotating magnetic field among the four poles.
A good comparison is the two-phase motor. Figure 3 (below) shows the pole positions of a two-phase, two-pole motor. A two-phase generator produces phases that are separated by 90 degrees, and the positive and negative peaks will create a rotating field in a two-phase stator. Single-phase motors mimic the two-phase motor by using the Phase Two poles as a start winding that can create a rotating field similar to that of a two-phase motor.
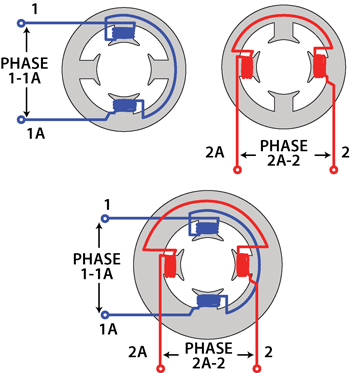
Figure 3: The pole positions of a two-phase, two-pole motor
Figure 4 (below) is a schematic of a split-phase, resistance-start, induction-run motor. In this arrangement, the auxiliary or start winding is wound with a smaller wire size than that of the main winding. This increases the resistance (and lowers inductance) in the winding and results in a smaller delay in current flow than does the main winding. An external resistance can also be used in conjunction with a larger wire size to obtain the same result.
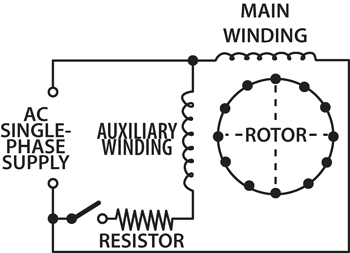
Figure 4: A schematic of a split-phase, resistance-start, induction-run motor
The resulting phase shift between the two windings is about 30 degrees and is sufficient to produce a low-torque, rotating field. It is not as good as the 90-degree shift produced by the two-phase motor, but it works. A centrifugal or thermal switch removes the start winding from the circuit once the motor reaches a certain speed. Resistance-start motors are available up to ½ horsepower and are popular due to their low cost. Their disadvantages include low starting torque and high inrush current, which produces additional heat during starting.
The split-phase design shown in Figure 5 is called a capacitor-start, induction-run motor. In this design, the start winding is wound with a normal wire size and connected in series with a capacitor. AC power current leads voltage in a capacitive circuit, but in an inductive circuit, main winding current trails voltage. This results in a phase shift of nearly 90 degrees and gives rise to a rotating field that is almost identical to the one produced by a two-phase motor.
A centrifugal or current-activated switch removes the start winding from the circuit as the motor approaches a certain speed. Due to the greater phase shift, capacitor-start motors have a relatively high starting torque (two to four times full load torque) and a moderate inrush current. This single-phase motor typically ranges in size from fractional to 3 horsepower.
A potential problem with larger, single-phase, induction-run motors is vibration. When operated on 60 hertz power, single-phase motors vibrate at 120 hertz. This particular frequency can create excessive noise if the motors are connected to a resonant prone load.
A variation of this design is the capacitor-start, capacitor-run motor. This design is similar to Figure 5 (below) except that it uses two capacitors. In addition to the start capacitor and its switch, a smaller, run capacitor is permanently wired in series with the start winding. Upon start, the start capacitor is removed from the circuit, but the run capacitor remains in series with the start winding and improves motor performance by providing a weaker, but smoothing, second phase during operation. This second run phase reduces vibration and noise. Capacitor-start, capacitor-run motors are available from 2 to 15 horsepower.
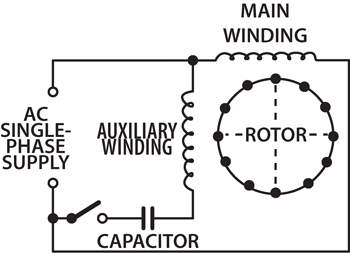
Figure 5: A capacitor-start, induction-run motor
Another design is the permanent split-capacitor (PSC) motor. It is also similar to the configuration shown in Figure 5, except that it contains no switch, and a single capacitor is permanently in series with the start winding. The capacitor is sized as a run capacitor and provides a rotating field that initiates rotation. Starting torque is limited to about 100 percent of full load torque. PSC motors are available up to 1 horsepower and are used in variable torque applications.
The simplest member of the single-phase family is the shaded pole motor shown in Figure 6 (below). It does not employ the split-phase technique but instead uses a “notched” pole design. A copper shorting ring is installed around the smaller portions of the notched poles and delays the buildup of the magnetic fields in the pole areas. From a rotor perspective, the field appears to rotate from the main portion of the pole to the shaded area, and it begins to rotate. Once rotating, the motor accelerates to full speed. Shaded pole motors are usually found in small heating and ventilating fans and range from 1/100 to 1/6 horsepower.
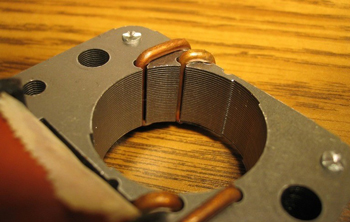
Figure 6: A shaded pole motor
Lower power, single-phase motors are essential components in both commercial and residential applications. There is, however, a trend toward using VFDs to replace higher horsepower models with three-phase motors. As a rule, drive horsepower is doubled when converting single-phase power to three-phase. The cost of drives can be offset with savings on wiring, starting components and reduced electrical consumption due to higher efficiency.
For further study, see the sites referenced in the March PumpEd 101. Next month's column reviews motor frame size, types of motor enclosures and motor nameplate data. Pumps & Systems, May 2011
Click the links below for the rest of the AC Motors series:
AC Motors: Magnetism and the DC Motor
AC Motors Part Two - Three Phase Operation
AC Motors Part 4: Frame Size, Enclosures & Nameplate Data
AC Motors Part 5: AC Motor Life
AC Motor Torque
