
Rotary pumps are positive displacement pumps that use rotational, rather than reciprocating, motion during their pumping cycle. They can be designed to pump liquids, solids, gases or mixtures of all three. Like reciprocating pumps, their capacity per rotation is independent of driven speed. Unlike reciprocals, however, they develop a dynamic liquid seal and do not require inlet and discharge check valves. Since the rotating element of the pump is directly connected to its driver via a shaft, some sort of drive shaft sealing arrangement is usually required. This is accomplished via a stuffing box, lip seal or a mechanical seal.
The rotational pumping cycle can appear complicated, but it is actually pretty simple. All rotary pumps, regardless of their design, undergo three rotational actions that are referred to as OTI/CTO, CTIO and OTO/CTI. These acronyms stand for open to inlet/closed to outlet, closed to inlet and outlet, and open to outlet/closed to inlet and are equivalent to the suction and discharge strokes of a reciprocating pump.
Pumping Action
Peristaltic Pumps
The peristaltic pump, shown in Figure 1 (image courtesy of Allweiler Pumps), belongs to a rotary family known as flexible member pumps. It is one of the simplest of the rotaries, and offers the clearest portrayal of the pumping action described above. The peristaltic pump gets its name from the muscular action of the human esophagus, which contracts progressively during the swallowing process and moves solids and liquids through the alimentary canal.
Its rotor is a bar with a shoe or roller at either end. The pumping chamber, or stator, is a continuous length of flexible tubing or hose set in a semicircular or U-shaped housing. The rolling or sliding motion of the rotor "pinches" the inner walls of the tubing together and forces liquid through the pump. Peristaltic pumps are popular in chemical applications because corrosive fluids are completely contained in the tubing and do not come into contact with other parts of the pump.
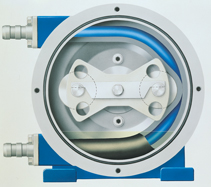
Figure 1 (image courtesy of Allweiler Pumps)
In Figure 1 the rotor is turning counterclockwise. The portion of the tubing below the right hand roller is open to the inlet and closed to the outlet of the pump (OTI/CTO) and is at suction pressure. The portion of the tube above the right hand roller is open to the outlet but closed to the inlet (OTO/CTI) and is at discharge pressure. When the right hand roller moves to the 12 o'clock position, the portion of the tubing between the two rollers is closed to both the inlet and outlet (CTIO). In the example shown, the pressure "stroke" is about one half rotation and all of the torque necessary to produce application pressure is placed upon the OTO/CTI roller.
Gear Pumps
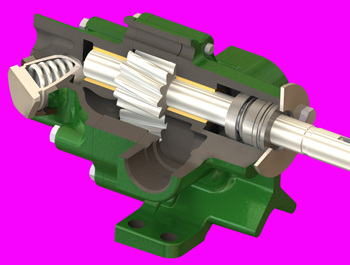
One of the most common rotary pumps is the gear pump. A typical cross section is shown in Figure 2 (image courtesy of Viking Pumps). It consists of two gears (rotors), one of which is driven by a shaft. The other acts as an idler and rotates through meshing action with the driven gear. Unlike the peristaltic pump, the gear pump has close tolerances between its rotors and the walls of the pump case. It is these clearances and the meshing of the gear teeth that allow the dynamic liquid sealing process to occur. These same clearances also determine the amount of leakage (slip) that occurs during operation.
 Figure 2 (image courtesy of Viking Pumps)
Figure 2 (image courtesy of Viking Pumps)
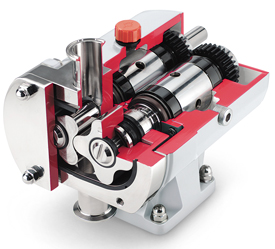
It is not difficult to see that the gear pump exhibits the same three pumping conditions. If the upper gear is rotating clockwise, the area to the left of the gears is OTI/CTO while the area to the right is OTO/CTI. The areas where the teeth are bound by the case walls are CTIO. Figure 3 (image courtesy of Roper Pumps) is a slightly different design known as a helical gear pump.
 Positive Displacement Pumps Figure 3 (image courtesy of Roper Pumps)
Positive Displacement Pumps Figure 3 (image courtesy of Roper Pumps)
Lobe Pumps
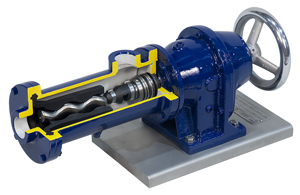
Figure 4 (image courtesy of Alfa Laval Inc.) is a cross section of a typical multiple lobe pump. These pumps are found in many industrial, wastewater and food processing applications. A major difference between lobe and gear pumps is that the rotors are designed to remain in close proximity throughout rotation. By close proximity, I mean that the lobes rotate about each other at extremely close tolerances but are not in contact. Since they do not mesh, an exterior timing gear is required to maintain proper rotation.
The pumping cycles are not as apparent in this particular cutaway but they are similar to the ones exhibited by the gear pump. Pumping torque is shared equally by both rotors; however, their individual loading at any given point in time depends on their axial position to each other.
 Positive Displacement Pumps Figure 4 (image courtesy of Alfa Laval Inc.)
Positive Displacement Pumps Figure 4 (image courtesy of Alfa Laval Inc.)
Screw Pumps
The screw pump differentiates itself from other rotary pumps in the way fluid moves through its pumping chamber. Fluid flows axially in the screw pump, but circumferentially in others. They are available in single and multiple rotor designs and offer a wide range of flows and pressures. Figure 5 (image courtesy of seepex Inc.) is a cross section of a single rotor screw pump.
 Positive Displacement Pumps Figure 5 (image courtesy of seepex, Inc.)
Positive Displacement Pumps Figure 5 (image courtesy of seepex, Inc.)
It consists of auger-like rotor with lobe shaped surfaces that mesh with a mating stator made of rubber or some other synthetic elastomer. Its pumping action creates a number of moving seals as CTIO volumes move axially through the stator. Since each CTIO volume appears to move intact through the entire length of the pumping chamber, this particular design is often referred to as a progressing cavity pump. These pumps will accommodate a wide range of liquids and viscosities and are often used to pump sewage sludge and other process solutions with concentrated solids.
Operating Characteristics
Pressure
As with reciprocating pumps the maximum pressure (P) generated by a rotary pump is determined by the application and the pump and driver components. The manufacturer specifics maximum working pressure, and maximum differential pressure depends on the pump's fluid sealing capability. For this reason, some of these designs are also often referred to as "semi" positive displacement pumps.
Capacity
The capacity (Q) of a rotary pump is proportional to its displacement (D) times it driven speed (rpm) less slip (S).
Q = (D x rpm) - S
The displacement of a rotary pump is defined as the net volume of fluid transferred from OTI to OTO during one rotation. Believe me when I say that this is all you will ever want to know! Because of the complex geometry that exists between the rotor and pump case, calculus is often required to compute actual displacement. It can be so complex that displacement is sometimes approximated.
Slip is similar to that in a reciprocating pump and is defined as the quantity of fluid that leaks from OTO to OTI per unit time. It depends on the clearances between the rotors and case and the operating pressure. Generally, slip increases in direct proportion to pressure and is most marked in designs like the flexible member pump. Flexible vane pumps (aka rubber impeller pumps) are especially subject to slip at higher pressures and tend to be inherently protected against over pressure.
Power
The power required for rotary pumps is calculated in the same manner as it is for reciprocals.
bhp = (Q x P) / (1714 x ME)
where 1714 is the bhp conversion factor and ME is mechanical efficiency.
Mechanical efficiency is the ratio of pump power output to pump power input.
October 2009, Pumps & Systems
