
The best option for preventing bearing currents depends on the source of the problem.
06/18/2014
Bearing currents occur in specific motor and drive installations and can lead to motor fatigue and failure. While no system is inherently immune to bearing currents, few installations experience bearing currents during normal operation. While many installations have preventive measures installed, knowing that protection is in place is sometimes outside the owner or operator’s scope. Therefore, end users must understand the symptoms and causes of bearing currents to properly identify and address this problem.
What Are Bearing Currents?
Bearing currents occur when an induced voltage on the motor shaft is high enough to overcome the breakdown voltage of the bearing lubricant. This is typically greater than 50 volts. These shaft voltages will do one of the following:- Cause the current to flow directly from the shaft, through a bearing, and through the motor or load frame into the ground (see Figure 1)
- Cause the current to circulate from one side of the shaft, through a bearing, through the motor frame, back into the opposite bearing, and back into the shaft (see Figure 2).
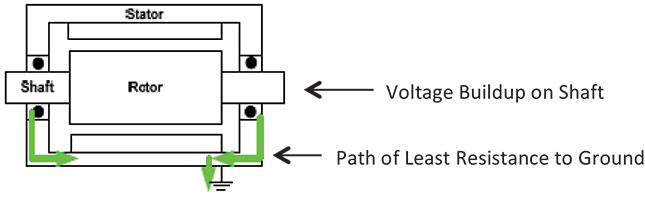 Figure 1. Current flow from shaft to ground
Figure 1. Current flow from shaft to ground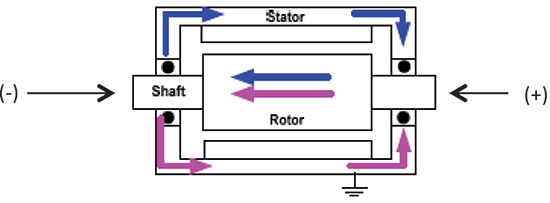 Figure 2. Circulating current flow in a motor
Figure 2. Circulating current flow in a motor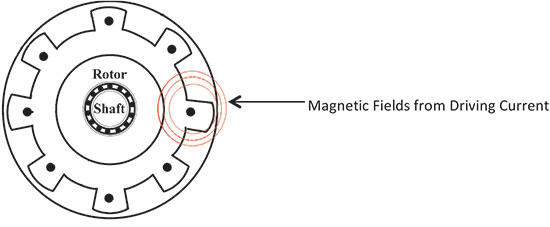 Figure 3. Magnetic fields from driving current
Figure 3. Magnetic fields from driving current Image 1. Fluting in bearing race caused by bearing currents
Image 1. Fluting in bearing race caused by bearing currentsBearing Current Causes
Voltage in the shaft is induced by the magnetic fields generated by current flowing through the motor windings. For motors connected across the utility line (not connected to a drive), these magnetic fields are ideally balanced and yield a net voltage of zero with respect to earth on the rotor and shaft. This is because the stator windings are symmetrical. When motors have asymmetry within the windings, it can cause a net voltage different than zero, which can lead to bearing currents. Drives can cause imbalances in the supply voltage through pulse width modulation (PWM). Motors supplied by PWM are unbalanced because the motor is supplied by pulses. This can result in a neutral point that is not equal to zero (such as a direct-current [DC] offset). The new neutral voltage is proportional to the common-mode voltage, or DC-link voltage, of the drive. Figure 4 is an example of common-mode voltage.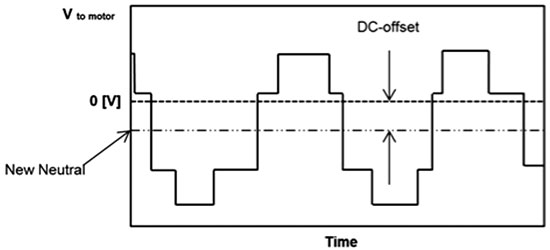 Figure 4. Three-phase voltage source inverter driving voltage with a common mode other than zero volts
Figure 4. Three-phase voltage source inverter driving voltage with a common mode other than zero voltsHow to Prevent Bearing Currents
Many methods for preventing bearing currents exist. Depending on the cause, some are better options than others. Different options include:- Use shielded motor cables that have symmetrical “protective earth” wires. This will provide a low-impedance path for currents caused by the high-frequency, common-mode voltages to return to the drive.
- Use specially insulated bearings on the opposite drive end or an insulated load coupling to stop the flow of current.
- Use shaft grounding brushes, which can be used to dissipate voltage buildup along the shaft. This is a better option for low horsepower motors.
- Fine stranded grounding cables can be used on the motor and the drive to more effectively ground high-frequency currents.
- Filtering can be applied to the motor side of the drive to remove high-frequency currents. No universal filter exists to remedy bearing currents. Therefore, this option is expensive and other options should be considered first.
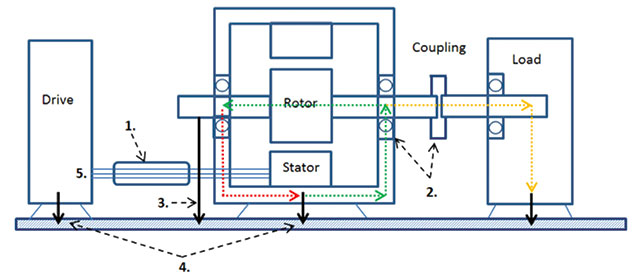 Figure 5. Three-phase voltage source inverter driving voltage with a common mode other than zero volts
Figure 5. Three-phase voltage source inverter driving voltage with a common mode other than zero voltsSolution Example
A large grain elevator in North Dakota had a 400 horsepower motor and variable frequency drive (VFD) installed on top of it. While both the motor and VFD were grounded, the length of cable to the ground was more than 1,000 feet. Loud squealing and noises began coming from the motor bearings. This indicated fluting in the bearing race caused by bearing currents. A motor grounding brush was installed upon startup as a preventive measure. However, the long cable length between the motor/drive and ground had allowed for large, common-mode voltages to occur during normal operation. As a result, a large flow of current moved through the grounding brush, which did not remove the difference in voltage potential between the motor shaft and ground. As a result, the motor shaft voltage increased with time and was then arcing through the bearing. Two measures were taken to resolve the situation. First, insulated motor bearings were installed. This prevented current from flowing through the bearings. The second was to replace the installed grounding cable with stranded grounding cables. This allowed for more current to flow through the grounding wires by eliminating the problem of skin effect. Skin effect occurs when high frequency currents pass through a conductor of a certain size. Because of the high frequency, current will only flow through the outer portion of a conductor and not through the inside (similar to glazing only being able to stick to the outside of a doughnut and not to the center). By using stranded cable with high frequency currents, the current is forced to flow through each strand, which reduces resistance of the grounding cable. This removed the large difference in voltage between the motor shaft and ground.Expert Help to Find the Cause
These solutions are all viable options, depending on the source of the problem. No solution is a cure all for bearing currents because they can have several causes. If an operator suspects that a system is experiencing bearing currents, consulting an engineering service with the proper measurement tools is the best way to identify the source of the problem.References
- J. Adabi, F. Zare, G. Ledwich, and A. Ghosh, “Leakage Current and Common Mode Voltage Issues in Modern AC Drive Systems,” Power Engineering Conference, 2007. AUPEC 2007.
- http://www.est-aegis.com/about_aegis.htm#
