
One of the major impacts on motor life is common sense—or maybe the lack thereof!
It always amazes me how many open drip proof (ODP) motors are used in agricultural irrigation applications where there is no pump house or even a simple cover over the motor. Rain and excess heat due to direct sunlight greatly reduce a motor's expected life.
And don't get me started on the piping arrangements found in some of these systems. Another example of negligence in Hawaii was the use of steel motor enclosures near the windward coastline. They were cheaper than cast iron or aluminum, but the high salt concentration in the air limited their life span to two or three years. Often they were replaced several times before the customer could be convinced to spend a little more up front.
Obviously, proper selection and application—including the enclosure, coatings, bearings, load and timely maintenance—will have a major impact on useful life. The induction motor component with the largest impact on motor life is the winding insulation and the largest contributor to shortened insulation life is heat.
Temperature—Ambient & Rise
More than 40 percent of all motor failures are due to overheating. The maximum allowable operating temperature of a motor depends on the insulation class used in the windings. Classes A, B, F and H have maximum centigrade temperatures of 105 degrees, 130 degrees, 155 degrees and 180 degrees respectively. These temperature ratings are the maximum temperature that can be tolerated for the insulation to provide an average life of 20,000 hours. Class A is pretty much history and B is usually limited to certain fractional horsepower motors. Most industrial motors, including EISA compliant models, are built with Class F or H.
The actual operating temperature of a motor is a combination of the ambient temperature (the temperature of the air surrounding the motor) and the internal temperature rise caused by the load. Most industrial motors have an ambient rating of 40 degrees C (104 degrees F). In the case of Class F insulation, the rise temperature (including hot spot allowance) would be limited to 115 degrees (155 degrees – 40 degrees).
The difference between the actual ambient temperature and the class rating is the allowable temperature rise. As a general rule, insulation life will double for each 10 degrees of unused allowable temperature. Unfortunately, the opposite is also true. For each 10 degrees over the allowable temperature, insulation life will be reduced by one half.
Temperature rise is measured by the resistance method and uses the equation below:
Rise ( ⁰C) = ((Rh – Rc) / Rc) x (234.5 + Ta)
Where:
Rh is the hot winding resistance in ohms
Rc is the cold winding resistance in ohms
Ta is the ambient temperature
Rc is measured before the motor is started, and Rh is measured after several hours of operation. If Ta increases due to the increased temperature of the motor, the increase should be subtracted from the calculated rise temperature. The sum of the actual rise and ambient temperatures is the operating temperature. Please note that motor surface temperature is not an indication of the actual operating temperature.
Another factor that can affect operating temperature is elevation. At elevations above 3,300 feet, the temperature rise increases by approximately 1 percent for each 330-foot rise in elevation. There are times, however, when increasing temperature can be a good thing. Motors that are installed in damp or humid environments can experience shortened insulation life due to condensation on the windings during extended periods of non operation. Heaters can be installed or a low "trickle" voltage can be applied to the windings to keep the temperature above the condensation point.
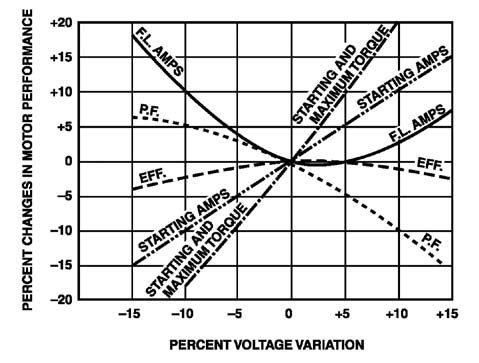
Figure 1. Percent changes in motor performance over a voltage range
Temperature—Voltage Variation
NEMA T-Frame motors are designed to tolerate a plus or minus 10 percent variation in its nameplate voltage. Notice that I said "tolerate," and toleration does not mean that there will not be some negative consequences.
Figure 1 shows the effects of low- and high-voltage on the performance of a typical T-Frame motor. It can be used to illustrate the general effects, but it is not completely accurate because these characteristics can vary substantially depending upon the winding design of a particular motor.
Figure 1 shows substantial changes in most of the characteristics over the voltage range. The one that contributes to motor temperature rise is full load amps (FLA). If you remove power factor from the equation, power in watts is roughly equivalent to the product of volts and amps. When voltage drops, a motor draws more amperage, keeping power in watts constant.
This is usually not a problem if the motor is not fully loaded and the amps do not exceed the nameplate FLA. If, however, the motor is fully loaded, a 5 to 10 percent voltage drop will cause amps to exceed FLA and maybe even service factor amps. This is especially problematic if a motor is operated at a consistently low voltage as the higher current draw will increase the operating temperature.
It would be reasonable to think that the exact opposite would occur at an increased voltage—amps should drop. However, higher than nameplate voltages can cause magnetic saturation in the stator and result in a much larger increase in current than shown in the graph. Even lightly loaded motors are prone to high amp draw at higher voltages, and the net result is an increase in operating temperature. It is always best to keep the source voltage as close as possible to the nameplate voltage.
Temperature—Current Unbalance
Unbalanced phase current is one of the largest contributors to reduced winding insulation life. Although the motor can be the culprit, unbalanced phase voltages and voltage distortion due to harmonics are the more typical causes.
Unbalanced phase voltages can be due to poor distribution by the utility or uneven single-phase loading on a three-phase system. A small voltage unbalance of only 2 percent can result in a current unbalance of 14 to 16 percent. This will result in an increase in temperature in the winding with the highest current load.
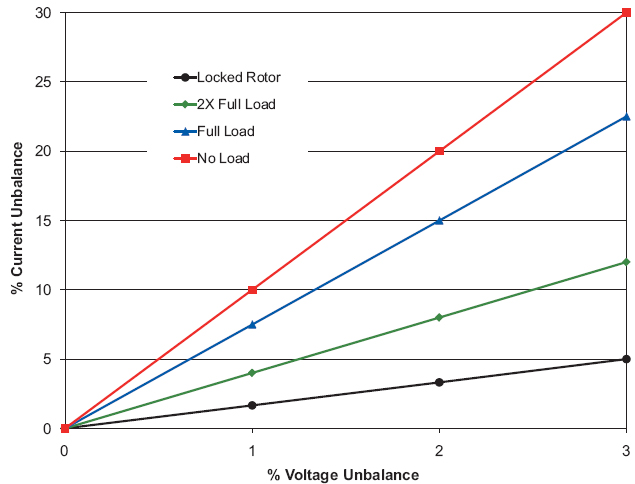
Figure 2. The effect of voltage unbalance on current unbalance
The percentage increase in temperature due to voltage unbalance is 2 x (% Voltage Unbalance)2. So, for a relatively small unbalance of 2 percent, winding temperature will increase by 8 percent. Current unbalance due to harmonics will not affect the phase voltages as measured by a volt meter, so the resulting current unbalance must be measured with an amp meter. Figure 2 shows the effect of voltage unbalance on current unbalance at various motor loads.
Current unbalance in motors that are operating at less than full load is usually not a problem as long as none of the legs exceed the nameplate amperage. For more information on diagnosing the sources of current unbalance and how to fix them, see "PumpEd 101," July 2008.
Although Class F and H insulations allow a temperature rise of 25 to 50 degrees more than Class B, motor manufacturers are using a portion of that increase to build higher horsepower motors on a smaller frame size. Therefore, we still have to pay attention to the factors that affect motor operating temperature if we want to achieve maximum winding life.
When Ed Cowern was with Baldor Motors, he wrote a 115 page white paper called the "Cowern Papers." It is, by far, the best and most comprehensive AC motor reference I have seen. It is also written in a simple and understandable "Pump Ed 101" manner.
Pumps & Systems, July 2011
